前日より引き続き、OpenCV でステレオ画像による深度計算をやっています。 昨晩、スマホの単眼カメラで撮影した2枚のステレオ画像の深度計算で割と良さそうな結果が出たので、Amazonで安いWebカメラを二つ注文。早速届いたので遊んでみます。
環境
- LMDE2 64bit
- OpenCV2
- Python2.7
カメラ
ロジクールの安いWebカメラを2台購入。購入時には1台1081円でした。田舎でも前日の深夜に注文した商品が翌日午後には届くのって素晴しすぎますね!引きこもって生きてゆけそう… _(:3」∠)_

こんな感じで、ディスプレイの上に二つならべて設置しました。Webカメラは可動域が多いので直線状に並べて2つのレンズに角度がつかないようにするのが大変でした。
スクリプト
カメラを2台使用するので、昨晩のスクリプトは使わず、下記のページを参考にしました。
試行錯誤な日々: openCVを利用したステレオカメラの作り方
動画
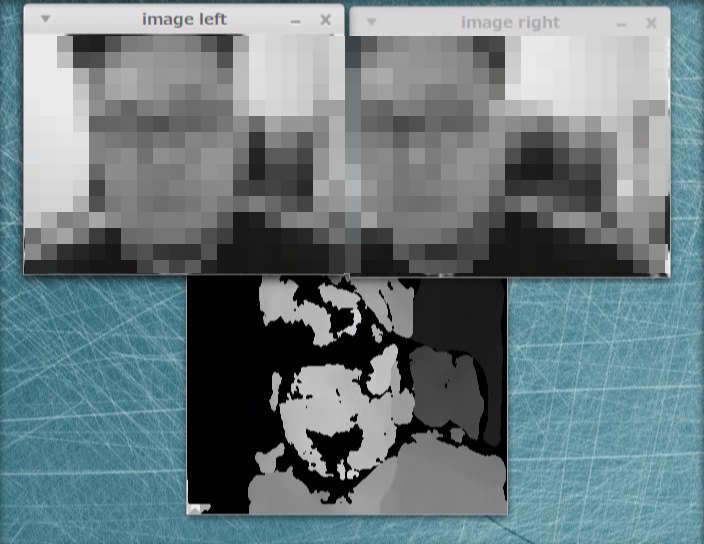
思っていたよりも滑らかなグラデーションがついていませんが、リアルタイムで処理できるのは楽しいですね。 もうちょっとパラメータの調整が必要なのかな。
[…] 先週からスマホカメラ、USBカメラ×2台、Kinect 360 と深度マップ撮影をやっていて、とうとう Kinect One の購入に至ったので書いておきます。 […]