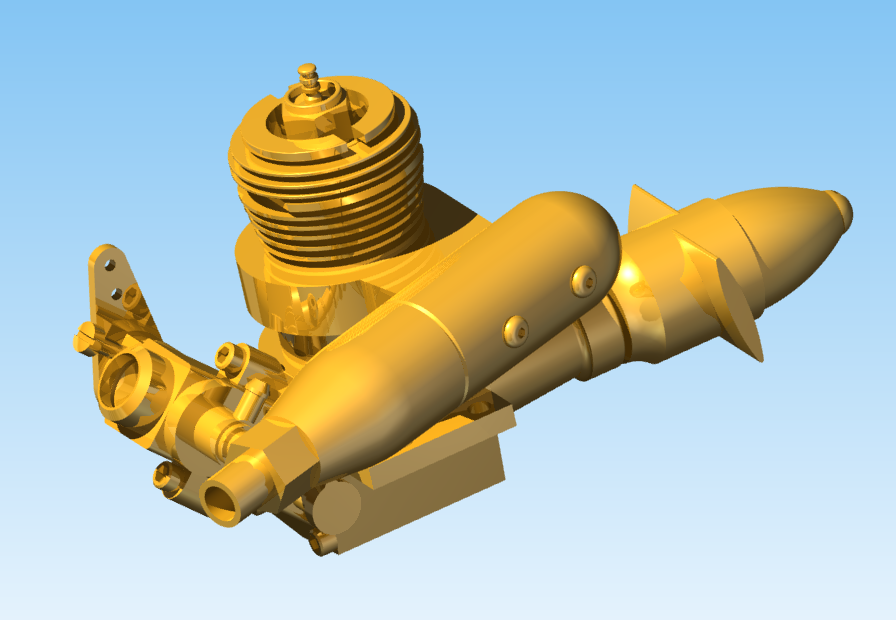
OpenCASCADE 6.7.0 ではレイトレーシング方式のレンダリングをサポートしている事を前回紹介しました。今回は、実際にコーディングをして試してみたものを紹介します。 前提 レイトレーシングレンダリングが何ぞや、…
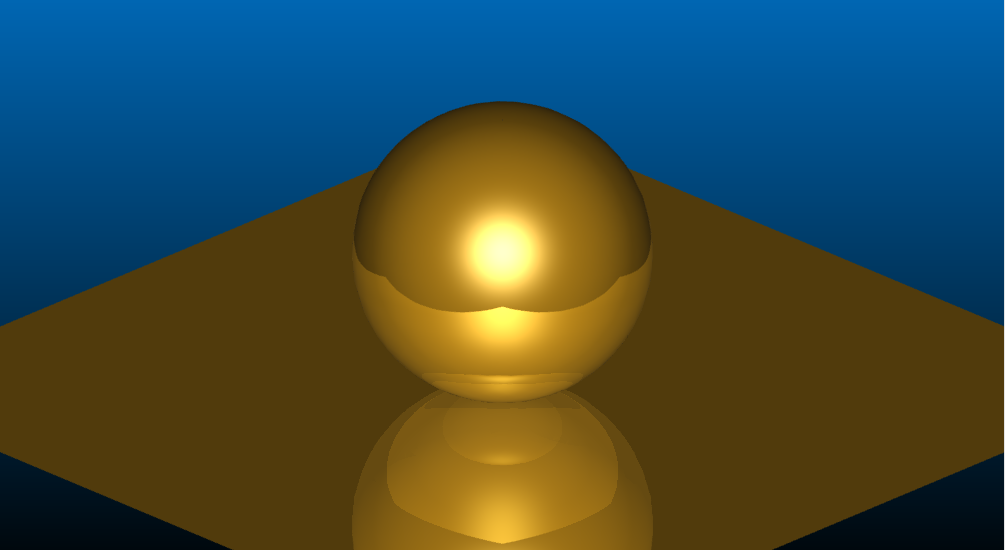
OpenCASCADE 6.7.0 ではレイトレーシング方式のレンダリングをサポートしている事を前回紹介しました。今回は、実際にコーディングをして試してみたものを紹介します。 前提 レイトレーシングレンダリングが何ぞや、…
OpenCASCADEの最新バージョン6.7.0が開発者サイトでアナウンスされています。 記事によると、6.7.0では特に visualization が強化されたようで、簡単かつ高速に高品位のレイトレーシング・レンダリ…
OpenCASCADE の Draw Test Harness の(ほぼ自分用の)日本語 Wiki を立ち上げるために、以前自分の個人サイトでも利用していた UseMod Wiki を導入することにしました。 UseMo…

OpenCASCADE の勉強のために、仕事とは関係ないところで、自分なりの簡易三次元 CAD ビューアを作成しています。 形状をパラメトリックに定義したり、対話的に制御したり、一連の処理をモジュール化する上で必要になっ…
前回までの記事では、OpenCASCADE の Draw Test Harness を利用し、独自コマンドを組み込むところまでを紹介しました。今回は、実例を用いながらコーディングしていきたいと思います。 目的 任意の半径…

前回の記事で、OpenCASCADE に同梱されているコマンド駆動型の効率的なデバッグ環境 Draw Test Harness の使い方を紹介しました。今回は、いよいよデバッグ&プレビュー環境として活躍させるための、独自…
OpenCASCADE には、コマンド駆動型の効率的なデバッグ環境 Draw Test Harness というものが付属しています。 OpenCASCADE のコードを、単機能ごとに評価できるツールとして開発には外せない…
OpenCASCADE で、幾何オブジェクトを管理するにはいくつも方法があるようですが、付属のコマンド実行環境 Draw Test Harness では、幾何オブジェクトに対して文字列の名前を与え、それで管理できる仕組み…
OpenCASCADE 6.6.0 がリリースされて数ヶ月経ちますが、ようやく自宅の環境でもビルドする暇が出来たので手順を書いておきたいと思います。 手順と言っても、ソースコードを落としてきて make するだけなので、…
OpenCASCADE の Python 実装である PythonOCC の人が、2011年の1月のブログ記事で OpenCASCADE のオブジェクトを WebGL 向けに出力する方法を紹介しています。2年以上経った今…