前回の記事の後半、RTAB-Map で freenect2 が使えない…と四苦八苦していましたが、そもそも今回購入した Microsoft XBox 360 Kinect センサーは v1 と呼ばれる古いものでした。なので、v2 用の freenect2 で動かなくて当然という…!なんということでしょう… (:3っ )っ
RTAB-Map でスキャン
その事実に深夜に気付いて RTAB-Map のメニューから freenect を有効にして使ってみると…
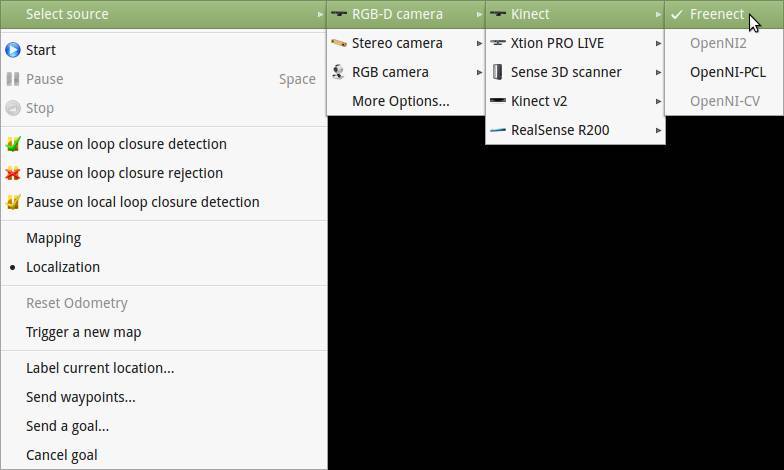
ちゃんと理想通りのスキャンができました!
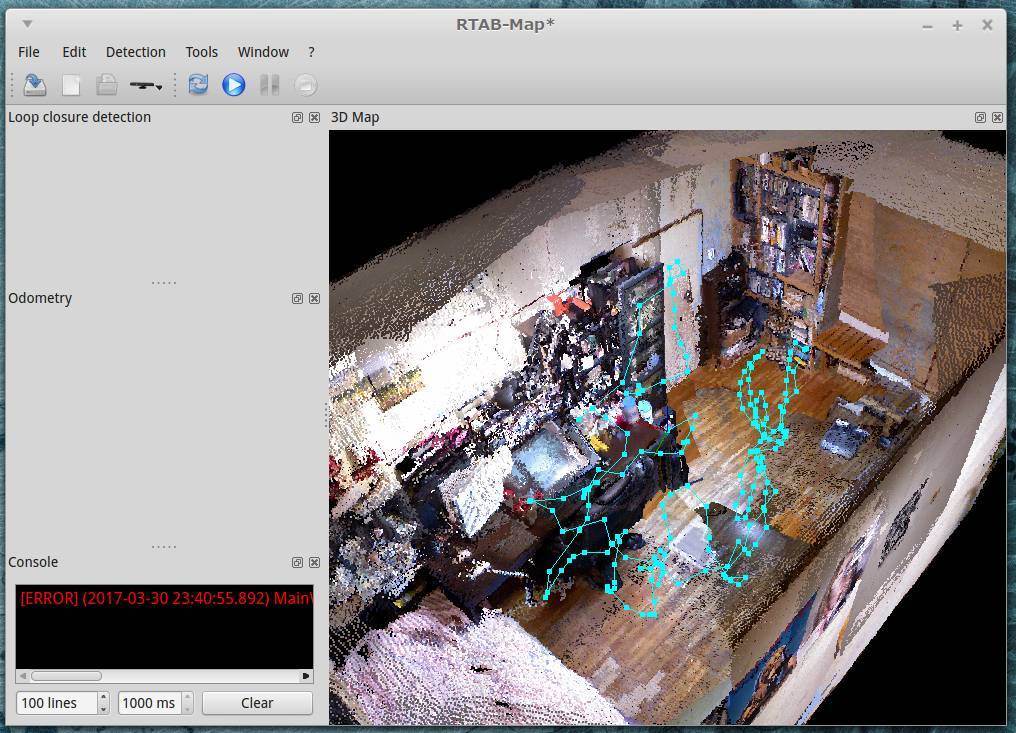
ちゃんと Kinect 自身の位置も情報として取得できているようで面白いですねー。スキャンしながらリアルタイムで位置合わせをしているのも興味深いです。(でも精度はそこそこ) スキャン後に改めて「Post processing」で自動位置合わせ処理を施すこともできるようです。
RTAB-Map から PCD 形式で出力し、pcl_viewer で表示した動画を置いておきます。
中古で5000円(うちケーブル代が3000円くらい)にしてはよく撮れているんじゃないでしょうか。
下記は Cloud Compare でノイズ除去、セグメンテーション調整(点群を切ったり貼ったり)、SSAO フィルタを有効にしてみた状態のスクリーンショットです。
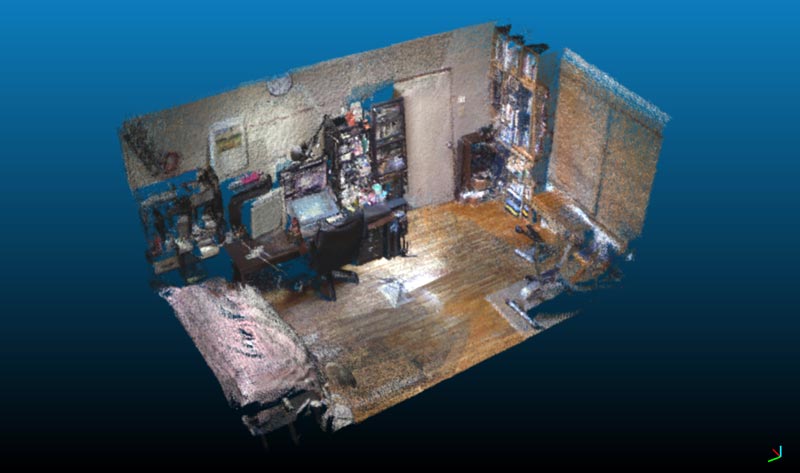
近付いてみなければそれっぽい!
Lenovo の赤外線深度計付きスマホ
そういえば、
GoogleのAR技術Tangoに世界初対応のスマホ「Phab 2 Pro」がついに日本発売 – GIGAZINE
という記事も出ていることですし、もっとポイントクラウド関連が賑っていけばいいですね! 早速、RTAB-Map と連携させて空間スキャンしてる方がいらっしゃいました。
もはや v2 買うわ!
せっかく kinect v2 用の freenect2 をビルドして組み込んだので、

コイツを新品で注文してしまいました。TOF方式になって精度も(ホストの要求スペックも)上がっているらしいので楽しみ!
[…] RTAB-Mapは […]
[…] RTAB-Mapは公式マニュアルを参考にインストールします。 […]