先週からスマホカメラ、USBカメラ×2台、Kinect 360 と深度マップ撮影をやっていて、とうとう Kinect One の購入に至ったので書いておきます。 新品が到着 Amazon で Kinect One 本体と…

先週からスマホカメラ、USBカメラ×2台、Kinect 360 と深度マップ撮影をやっていて、とうとう Kinect One の購入に至ったので書いておきます。 新品が到着 Amazon で Kinect One 本体と…
前回の記事の後半、RTAB-Map で freenect2 が使えない…と四苦八苦していましたが、そもそも今回購入した Microsoft XBox 360 Kinect センサーは v1 と呼ばれる古いものでした。なの…

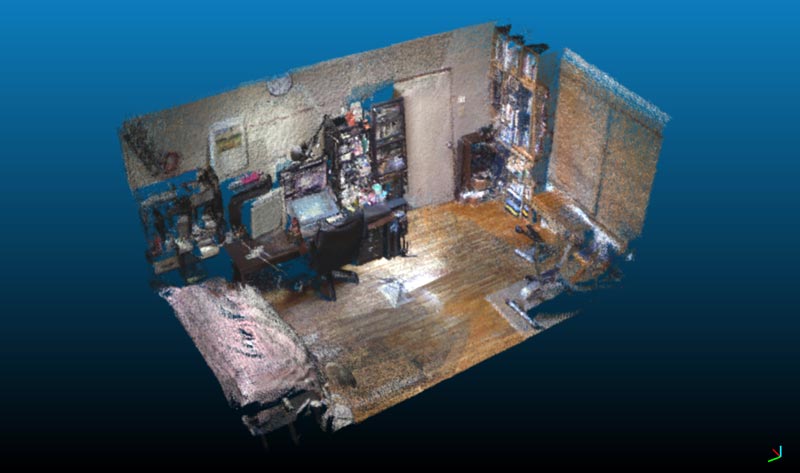
昨日、Amazon で中古で売ってあったMicrosoft Xbox 360 Kinect センサーが届いたので、早速 Linux で使ってみました。 環境 LMDE2 64bit Microsoft XBox Kine…
heroku わかりやすい。 Heroku入門 (全12回) – プログラミングならドットインストール heroku 上で Rails アプリが動くところまでざっと見てみました。てか、heroku の前にまと…