今更感がありますが、Raspberry Pi Zero WH (ラズベリーパイ ゼロ)を入手したのでセットアップ方法を記載しておきます。主に自分用の覚え書き目的です。

今更感がありますが、Raspberry Pi Zero WH (ラズベリーパイ ゼロ)を入手したのでセットアップ方法を記載しておきます。主に自分用の覚え書き目的です。
Raspberry Pi 3 が届きました! 発売より半年ほど出遅れましたが、ようやく Raspberry Pi 3 Model B を購入したので、組み込み向け軽量 Ruby である mruby を動かしていきたいと思…
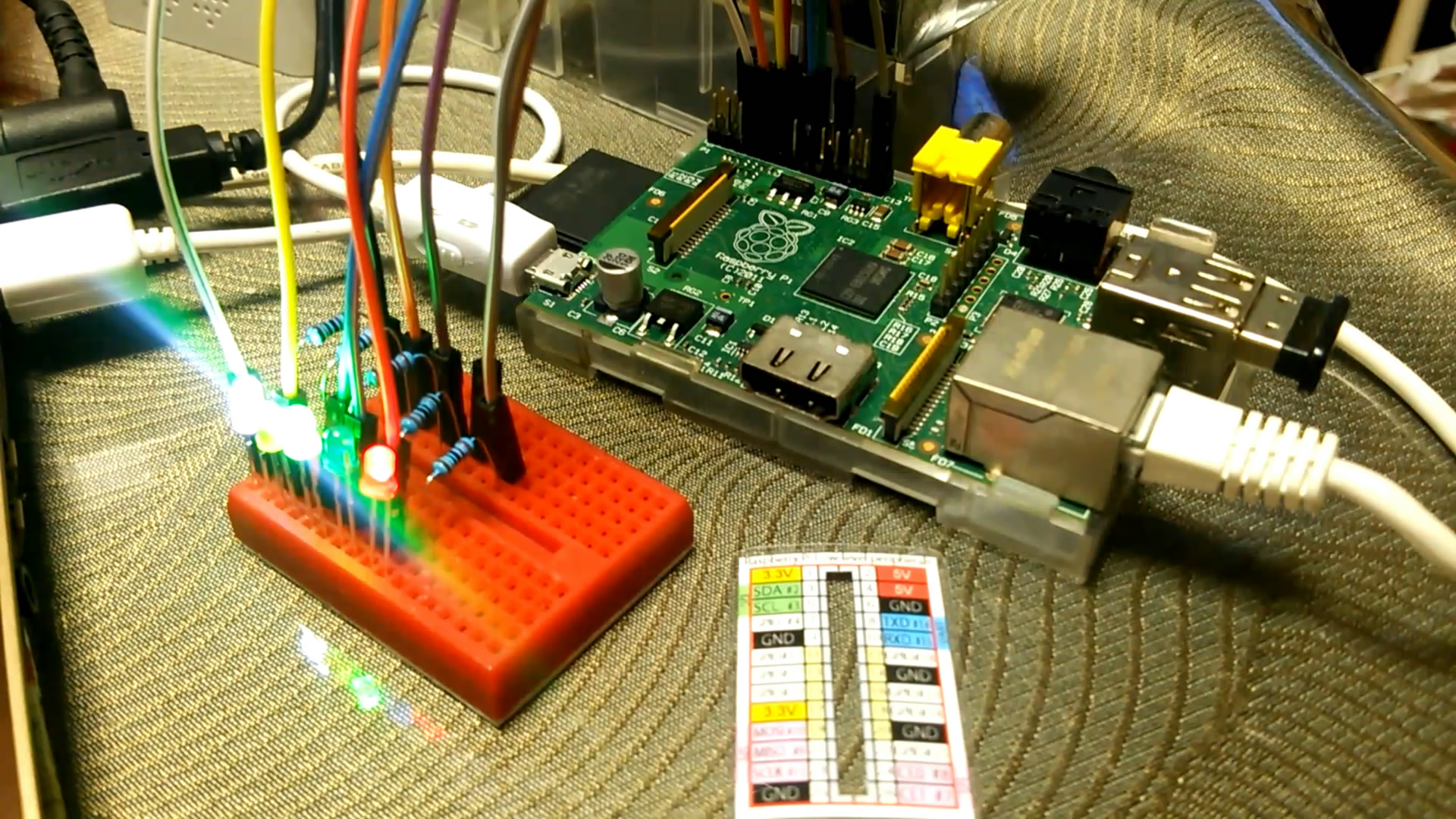
ラズパイを何年も前に購入して Raspbian を入れて ssh できて、X も動いてふぅ…と、ひと落ちつきした後、全然触っていませんでした。 せっかくラズパイを持っているんだからと思い立ち、ヤフオクで売っているキットを…